Sensor definitions mean information that is
needed in populating a
SensorInfo
and a
ChannelInfo
objects. All the information cannot be
defined, because it is vendor specific. This appendix will describe
some of the needed information such as a data type, a unit, and
measurement rates. The example sensors are selected based on
expected popularity and frequency. Needed quantities and context
types are given in Appendix A. Finding sensors.
The goal of these recommendations is to help in unifying the sensor implementations accross different manufacturer platforms.
An accelerometer
An accelerometer is measuring acceleration of the device. The
context type is
SensorInfo.CONTEXT_TYPE_USER
, because
the acceleration is caused by the user moving the device.
Table E.1. Parameter values with the measurement range [-2g,2g]
|
Channel name |
Data type |
Scale |
MeasurementRange |
Resolution |
Symbol of the unit |
|---|---|---|---|---|---|
|
axis_x |
double |
0 |
[-19.61, +19.61] |
8-bit/12-bit |
m/s^2 |
|
axis_y |
double |
0 |
[-19.61, +19.61] |
8-bit/12-bit |
m/s^2 |
|
axis_z |
double |
0 |
[-19.61, +19.61] |
8-bit/12-bit |
m/s^2 |
Table E.2. Parameter values with the measurement range [-6g,6g]
|
Channel name |
Data type |
Scale |
MeasurementRange |
Resolution |
Symbol of the unit |
|---|---|---|---|---|---|
|
axis_x |
double |
0 |
[-58.84, +58.84] |
8-bit/12-bit |
m/s^2 |
|
axis_y |
double |
0 |
[-58.84, +58.84] |
8-bit/12-bit |
m/s^2 |
|
axis_z |
double |
0 |
[-58.84, +58.84] |
8-bit/12-bit |
m/s^2 |
The accelerometer is a public sensor and does not require permissions.
|
|
|
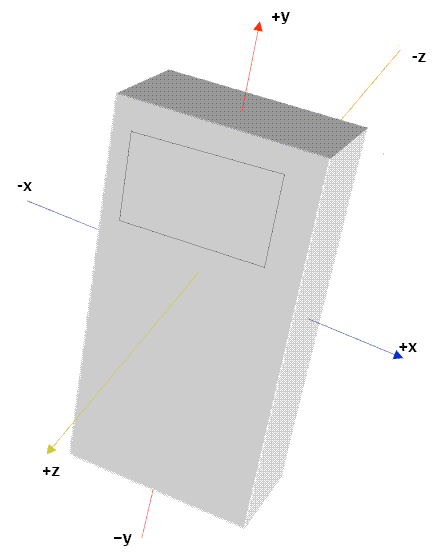
Figure E.1: A mono-display device and its co-ordinate axes
Table E.3. ChannelInfo information of axis_x:
|
Field |
Value |
|
Name |
"axis_x" |
|
Accuracy |
0.025 |
|
Data type |
ChannelInfo.TYPE_DOUBLE |
|
Measurement range |
[-19.61,19.61],[-58.84,58.84] |
|
Resolution |
0.01 in [-19.61,19.61]; 0.003 in [-58.84,58.84] |
|
Unit |
"m/s^2" |
Table E.4. ChannelInfo information of axis_y:
|
Field |
Value |
|
Name |
"axis_y" |
|
Accuracy |
0.025 |
|
Data type |
ChannelInfo.TYPE_DOUBLE |
|
Measurement range |
[-19.61,19.61],[-58.84,58.84] |
|
Resolution |
0.01 in [-19.61,19.61]; 0.003 in [-58.84,58.84] |
|
Unit |
"m/s^2" |
Table E.5. ChannelInfo information of axis_z:
|
Field |
Value |
|
Name |
"axis_z" |
|
Accuracy |
0.025 |
|
Data type |
ChannelInfo.TYPE_DOUBLE |
|
Measurement range |
[-19.61,19.61],[-58.84,58.84] |
|
Resolution |
0.01 in [-19.61,19.61]; 0.003 in [-58.84,58.84] |
|
Unit |
"m/s^2" |
Table E.6. SensorInfo of an accelerometer:
|
Field |
Value |
|
Quantity |
"acceleration" |
|
Context type |
SensorInfo.CONTEXT_TYPE_USER |
|
Connection type |
SensorInfo.CONN_EMBEDDED |
|
Model |
vendor specific (e.g. "LinearAccelerometerA") |
|
URL |
"sensor:acceleration;contextType=user;model=LinearAccelerometerA" |
|
Description |
"acceleration sensor. axis_x channel gives acceleration in x axis direction, where move to left gives negative values and to right positive values. axis_y channel gives acceleration in y axis direction, where move upwards gives positive value and downwards negative value. Axis_z channel gives acceleration in z axis direction, where move toward the user is positive and away is negative. The sensor is always on." |
An ambient light sensor
An ambient light sensor measures the intensity of the ambient light, as the total luminous flux incident on a surface. A used unit is lux (lx).
Table E.7. Sensor information of an "ambient_light" sensor:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
ambient_light |
int |
0 |
[0,65535] |
lx |
The largest value of the measurement range achieved with the available 16 bits is:
2^16 -1 = 65536 -1 =65535
The ambient light sensor is a public sensor and does not require permissions.
A battery charge sensor
The battery charge sensor measures the battery charge level of the device. It shall represent the charge level as a percentage of the maximum charge level of the battery:
0% =empty, 100% = full.
Table E.8. Sensor information of a "battery_charge" sensor:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
battery_charge |
int |
0 |
[0,100] |
% |
The battery charge sensor is a public sensor and requires no permissions.
A charger state sensor
This sensor indicates if the device is connected to a charger or not:
Table E.9. Sensor information of a "charger_state" sensor:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
charger_state |
int |
0 |
[0,1] |
boolean |
A "not charged" state equals 0.
A "charged" state equals 1.
Accuracy is -1, and thus uncertainty values are always 0.
The "charger_state" sensor is a public sensor and does not require permissions.
A double tap sensor
This sensor indicates if the device is double tapped and also the direction of tapping:
Table E.10. Sensor information of a "double_tap" sensor:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
double_tap |
int |
0 |
[1,63] |
int |
1 equals axis_x plus direction
2 equals axis_x minus direction
3 equals axis_x direction unknown
4 equals axis_y plus direction
8 equals axis_y minus direction
12 equals axis_y direction unknown
16 equals axis_z plus direction
32 equals axis_z minus direction
48 equals axis_z direction unknown
63 equals direction unknown
Figure E.2. illustrates the axes and directions. The "double_tap" sensor is a public sensor and does not require permissions.
A fingerprint sensor
The fingerprint sensor is used to identify the user. The data from the sensor can be offered in various formats. It can be low level information, such as a byte array, or more processed data, such as an identity. The Object type to be returned is not specified.
Table E.11. Sensor information of a "fingerprint" sensor:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
id |
Object |
0 |
- |
id |
|
finger_id |
int |
0 |
[-5,5] |
finger_id |
The id Object must be unique. Every finger must also have a unique id since several fingerprints can be saved for one user.
Table E.12. Finger ids:
|
Finger |
id |
|
Left little finger |
-5 |
|
Left ring finger |
-4 |
|
Left middle finger |
-3 |
|
Left index finger |
-2 |
|
Left thumb |
-1 |
|
Not identified |
0 |
|
Right thumb |
1 |
|
Right index finger |
2 |
|
Right middle finger |
3 |
|
Right ring finger |
4 |
|
Right little finger |
5 |
To be able to report errors in data reading, following codes are to be used. The fingerprint sensor does not have to support all the error codes defined, but MUST NOT define a new error code whose meaning overlaps with any of the codes listed here. The fingerprint sensor MAY also define a new proprietary error code if the desired error type is missing.
Table E.13. Error codes:
|
Error code as int value |
Meaning |
|---|---|
|
1 |
The data is not from a live finger |
|
2 |
Finger was swept too fast |
|
3 |
Finger was swept too slowly |
|
4 |
Finger position was too far in the left |
|
5 |
Finger position was too far in the right |
|
6 |
Finger was positioned too close to the top of the sensor |
|
7 |
Finger was positioned too close to the bottom of the sensor |
|
8 |
Finger was pressed too lightly |
|
9 |
Finger was pressed too heavily |
|
10 |
Finger was rotated too much during measurement |
|
11 |
Finger was swept in skew angle |
The fingerprint sensor is a private sensor and requires permission javax.microedition.sensor.PrivateSensor.
A flip state sensor
The flip state sensor indicates the state of the flip of the device: open or closed. The two states are applicable to devices that can have 2 different physical states, for example, a clamshell type device.
Table E.14. Sensor information of a "flip_state" sensor:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
flip_state |
int |
0 |
[0,1] |
boolean |
The closed state equals 0
The opened state equals 1
Accuracy is -1, and thus uncertainty is always 0.
The flip state sensor is a public sensor and requires no permissions.
A heart rate and RR interval sensors
Two types of sensors measuring heart rate are defined:
-
heart_rate -
RR_interval
The
heart_rate
sensor is giving data as averaged beats
per minute.
Table E.15. Sensor information of a "heart_rate" sensor:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
heart_rate |
int |
0 |
[0,240] |
bpm |
For more serious health application it is
important to measure, for example, RR interval changes; RR
intervals can be got with the
RR_interval
sensor.
Table E.16. Sensor information of a "RR_interval" sensor:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
RR_interval |
int |
-3 |
[0,10000] |
s |
In normal cases the range for RR intervals is [250ms, 2500ms].
Both the
heart_rate
and
RR_interval
sensors are
private sensors and require permission javax.microedition.sensor.PrivateSensor.
A network field intensity sensor (a signal strength sensor)
The network field intensity sensor measures the strength of the current network connection. The quality or strength of the current network signal is expressed as a percentage: 0 =no signal, 100 =best signal
The actual field intensity values are measured in dBm units. When converting dBm to % value, the result must comply with the number of bars shown in the device screen.
Table E.17. Sensor information of a "network_field_intensity" sensor:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
network_field_intensity |
int |
0 |
[0,100] |
% |
The network field intensity sensor is a public sensor and requires no permissions.
Table E.18. ChannelInfo of a "network_field_intensity" sensor:
|
Field |
Value |
|
Name |
"network_field_intensity" |
|
Accuracy |
0.02 |
|
Data type |
ChannelInfo.TYPE_INT |
|
Measurement range |
[0,100] |
|
Resolution |
1 |
|
Unit |
"%" |
Table E.19. SensorInfo of a "network_field_intensity" sensor:
|
Field |
Value |
|
Quantity |
"network_field_intensity" |
|
Context type |
SensorInfo.CONTEXT_TYPE_DEVICE |
|
Connection type |
SensorInfo.CONN_EMBEDDED |
|
Model |
vendor specific (e.g. "generic2") |
|
URL |
"sensor:network_field_intensity;contextType=device;model=generic2" |
|
Description |
"network_field_intensity sensor. network_field_intensity channel gives signal strength of the used network. The sensor is always on." |
A proximity sensor
The proximity sensor is a sensor giving the distance between the person and the device. An accuracy and a measurement range varies a lot depending on technique used, whether for example optical, capacitive, or pyroelectric.
Table E.20. Sensor information of a "proximity" sensor:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
proximity |
double |
0 |
[0,2.5] |
m |
The proximity sensor is a public sensor and does not require permissions.
An orientation sensor
The orientation sensor provides coarse-grained information of an orientation of a device. The information can be used to detect, for example, a switch from a portrait to a landscape orientation.
Table E.21. Sensor information of an "orientation" sensor:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
orientation |
int |
0 |
[0,32] |
unit |
The predefined states are:
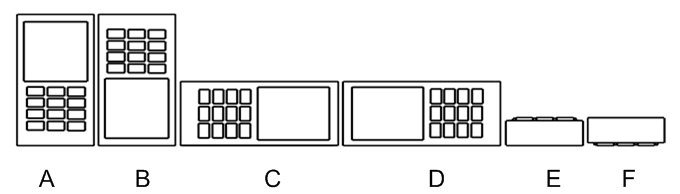
Figure E.3: Orientation states, the phone in A is in upright position.
Table E.22. The data value constants of orientation:
|
Orientation |
Value |
|---|---|
|
undefined |
0 |
|
A |
1 |
|
B |
2 |
|
C |
3 |
|
D |
4 |
|
E |
5 |
|
F |
6 |
The orientation sensor is a public sensor and does not require permissions.
A rotation sensor
A rotation sensor provides a very detailed information about the orientation of the device. When an accelerometer was handled, the x, y, and z directions were fixed. Rotations are done around these axes accordingly. Games and UI elements can use a rotation sensor as an input modality.
Table E.23. Information of a "rot_x" channel:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
rot_x |
int |
0 |
[0,359] |
degree |
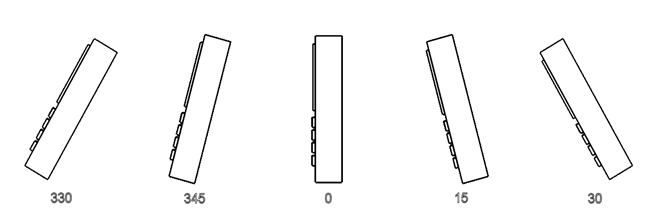
Figure E.4: Rotation around x axis and corresponding "rot_x" channel data values.
Table E.24. Information of a "rot_y" channel:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
rot_y |
int |
0 |
[0,359] |
degree |
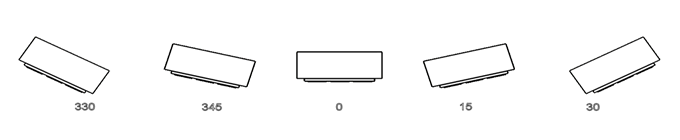
Figure E.5: Rotation around y axis and corresponding "rot_y" channel data values.
Table E.25. Information of a "rot_z" channel:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
rot_z |
int |
0 |
[0,359] |
degree |
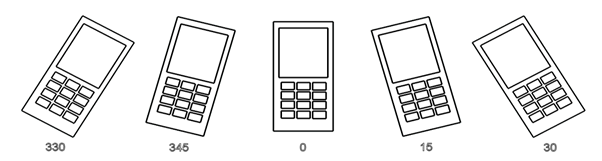
Figure E.6: Rotation around z axis and corresponding "rot_z" channel data values.
Data value equals 0, when it cannot be defined. In the case of
an accelerometer, the rotation value cannot be defined when the
corresponding axis is parallel to the gravitational force or the
device is in free fall. In the case of the magnetometer, it is
difficult to measure values, when the axis is parallel to the
magnetic field. Validity must be set on to get information about
invalid values. Setting is done by calling
SensorConnection.getData()
/
SensorConnection.setDataListener()
with
isValidityIncluded
as
true
.
The rotation sensor is a public sensor and does not require permissions.
A sound level setting sensor
The sound level sensor represents the current sound level setting of the device as a percentage of the maximum sound volume setting:
0 =MUTE, 100 = MAX
Table E.26. Sensor information of a "sound_level_setting" sensor:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
sound_level_setting |
int |
0 |
[0,100] |
% |
The sound level setting sensor is a public sensor and does not require permissions.
A step counter
The step counter provides the count of taken steps cumulatively.
The count is reset when the data retrieval is restarted. In the
asynchronous mode, the
DataListener
is notified by
each step. In the synchronous mode, the current sum of steps is
returned immediately.
Table E.27. Sensor information of a "step_count" sensor:
|
Channel name |
Data type |
Scale |
MeasurementRange |
Symbol of the unit |
|---|---|---|---|---|
|
step_count |
int |
0 |
[0,
|
unit |
The step counter is a public sensor and does not require permissions.
Boolean value sensors
If the sensor is returning boolean-type
values, such as "on"/"off", "active"/"idle" or
true
/
false
, it must instead of using
Boolean
objects, use
int
values and
boolean
unit.
The value of 0 indicates "off","idle", and
false
, whereas the value of 1 indicates "on",
"active", and
true
.
Car related sensors
JSR 298 defines the set of car related sensors, please refer to the Telematics API for Java ME specification (JSR 298) for more information. The specification can be downloaded from JSR 298 web page .
The subset of JSR 256 has been borrowed for JSR 298 to avoid
overlapping functionality. The subset contains the core
functionality to fetch data from a sensor. The other way to do this
is to have both the JSR 256 and JSR 298 implemented in the same
device. The car related sensors have a
SensorInfo.CONTEXT_TYPE_VEHICLE
context type.